Model Transport: Towards Scalable Transfer Learning on Manifolds
In
Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR),
pages 1378 -1385,
Columbus, Ohio, USA.
June
2014.
Abstract:
▸
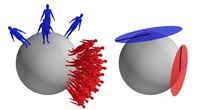
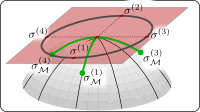
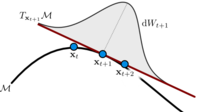
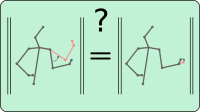
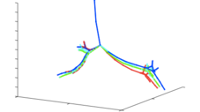
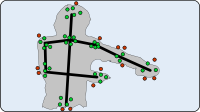
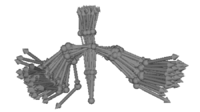
We consider the intersection of two research fields: transfer learning and statistics on manifolds. In particular, we consider, for manifold-valued data, transfer learning of tangent-space models such as Gaussians distributions,
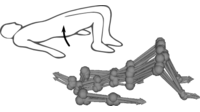
PCA, regression, or classifiers. Though one would hope to simply use ordinary Rn-transfer learning ideas, the manifold structure prevents it. We overcome this by basing our method on inner-product-preserving parallel transport, a well-known tool widely used in other problems of statistics on manifolds in computer vision. At first, this straightforward idea seems to suffer from an obvious shortcoming: Transporting large datasets is prohibitively expensive, hindering scalability. Fortunately, with our approach, we never transport data. Rather, we show how the statistical models themselves can be transported, and prove that for the tangent-space models above, the transport “commutes” with learning. Consequently, our compact framework, applicable to a large class of manifolds, is not restricted by the size of either the training or test sets. We demonstrate the approach by transferring PCA and logistic-regression models of real-world data involving 3D shapes and image descriptors.
Sending email...