Classification of colon polyps in NBI endoscopy using vascularization features
Stehle, T., Auer, R., Gross, S., Behrens, A.,
Wulff, J., Aach, T., Winograd, R., Trautwein, C. and Tischendorf, J.
In
Medical Imaging 2009: Computer-Aided Diagnosis,
SPIE,
volume 7260,
February
2009.
Abstract:
▸
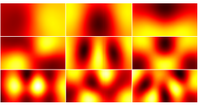
The evolution of colon cancer starts with colon polyps. There are two different types of colon polyps, namely hyperplasias and adenomas. Hyperplasias are benign polyps which are known not to evolve into cancer and, therefore, do not need to be removed. By contrast, adenomas have a strong tendency to become malignant. Therefore, they have to be removed immediately via polypectomy. For this reason, a method to differentiate reliably adenomas from hyperplasias during a preventive medical endoscopy of the colon (colonoscopy) is highly desirable. A recent study has shown that it is possible to distinguish both types of polyps visually by means of their vascularization. Adenomas exhibit a large amount of blood vessel capillaries on their surface whereas hyperplasias show only few of them. In this paper, we show the feasibility of computer-based classification of colon polyps using vascularization features. The proposed classification algorithm consists of several steps: For the critical part of vessel segmentation, we implemented and compared two segmentation algorithms. After a skeletonization of the detected blood vessel candidates, we used the results as seed points for the Fast Marching algorithm which is used to segment the whole vessel lumen. Subsequently, features are computed from this segmentation which are then used to classify the polyps. In leave-one-out tests on our polyp database (56 polyps), we achieve a correct classification rate of approximately 90%.
Sending email...