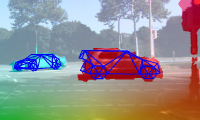
Image motion provides powerful cues about scene structure. Our work addresses:
- Robust estimation of optical flow.
- Motion estimation over long sequences.
- Layered models of motion.
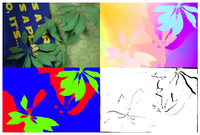
- Segmentation of scenes in motion.
- Detection of occlusion and disocclusion.
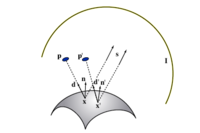
- Inference of structure and material.
- Datasets for quantitative evaluation of optical flow.
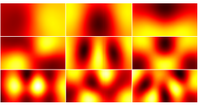
- Learning models of image motion.
- Biological models of motion perception.
This method implements many of the currently best known techniques for accurate optical flow and is ranked #1 on the Middlebury evaluation as of June 2010.
The software is made available for research pupropses. Please read the copyright statement and contact me for commerical licensing.
The Matlab flow code is easier to use and more accurate than the original C code. The objective function being optimized is the same but the Matlab version uses more modern optimization methods:
Matlab implementation of Black and Anandan robust dense optical flow algorithm
The method in 1 above is more accurate and also implements Black and Anandan plus much more.
The optical flow software here has been used by a number of graphics companies to make special effects for movies. This software is provided for research purposes only; any sale or use for commercial purposes is strictly prohibited.
Please contact me if you wish to use this code for commercial purpose.
If you are a commercial enterprise and would like assistance in using optical flow in your application, please contact me at my consulting address black@opticalflow.com.
This is EXPERIMENTAL software. It is provided to illustrate some ideas in the robust estimation of optical flow. Use at your own risk. No warranty is implied by this distribution.
There are two versions available. First, the original C code implementing the robust flow methods described in Black and Anandan '96: